Since the start of this school period on November 13th, we continued working on creating our prototype. Because it is our penultimate school period, a large part of our timetable is filled with "Project" time.
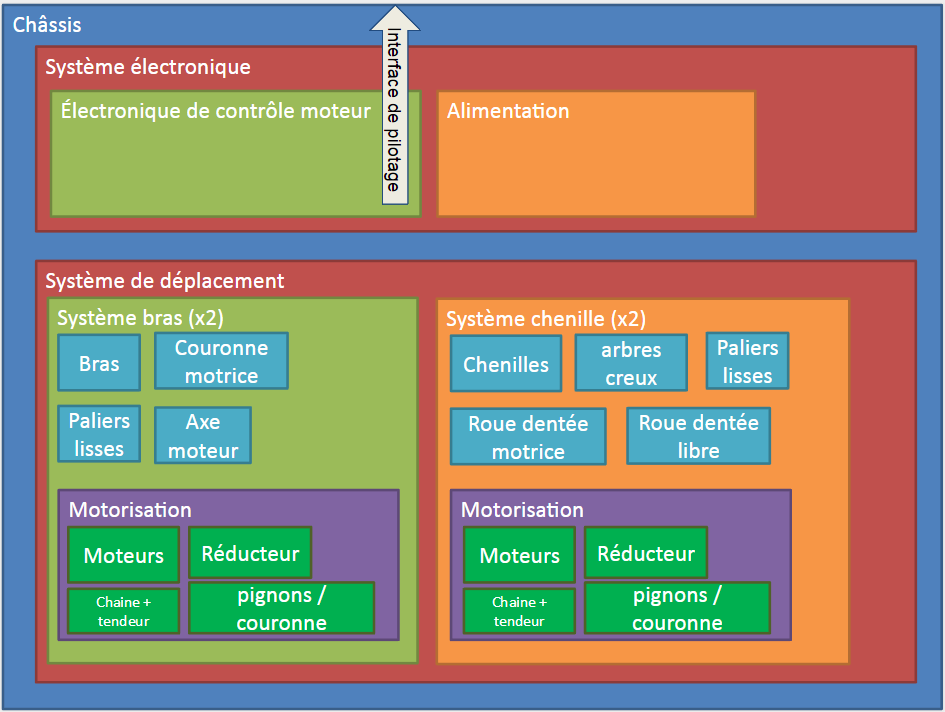
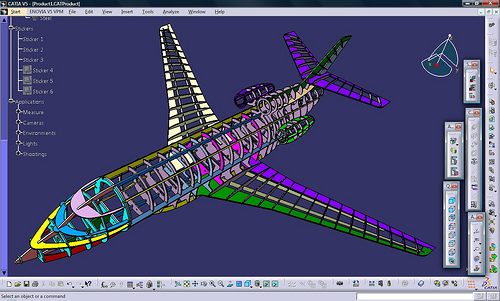
To begin with, we had received our motors and planetary gearboxes, received gearwheels that we had bored to the right dimensions, we had begun programming the Arduino Mega, finished our 3D design and were controlling the parts' blueprints.
As of now, we have machined a large majority of our metal parts and begun assembling the prototype's frame. Some parts had to be modified to take into account the characteristics of our school's workshop. For exemple one major part, the wheels, have to be sintered since they cannot be milled. Also, the original RICA III motors were joined to the frame through a sinter support.
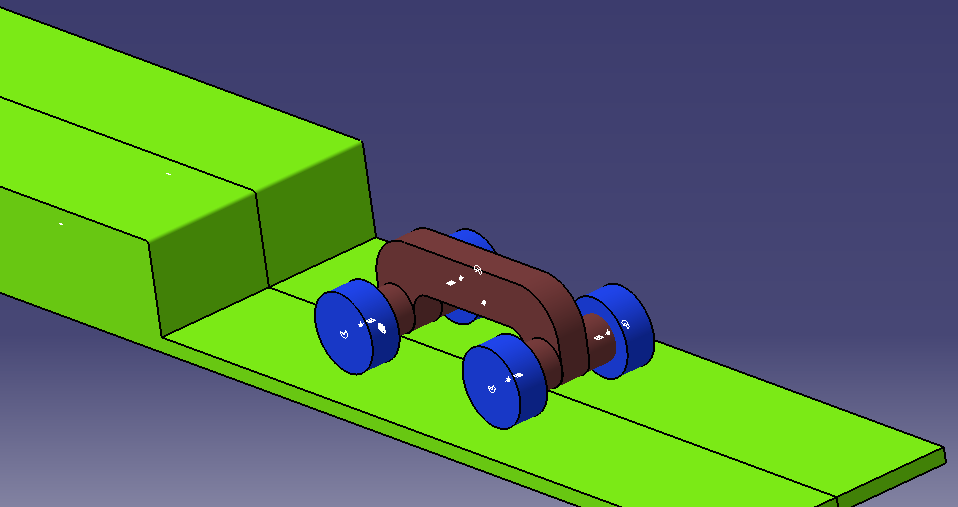
For testing and validation purposes, we also worked with the other MKX team to produce a step to the right dimensions (30*28 cm).
Concerning the electronics and programming part of our project, we :
- realized the main program of our Arduino Mega,
- received the encoders and began integrating them,
- created the encasing for the electronics.
At this point, we can control our motors with a Xbox 360 controller. Still, we are missing some components and cannot finish programming at the moment.
We also worked on a 3D simulation of our prototype's movements on the software Unity (More details in this post).
We are halfway through this period, and "Project" time will be less present in our timetables, but we plan to continue working and if possible have a fully assembled prototype for December 15th.