When we hear documentaries or conversations about the nuclear field, you will always hear about radiations. But what are those harmful rays ? In this article we will answer to this questions and we will describe the different measures used in this field. Finally we will explain why nuclear radiations can be harmful for robots.
Radiations are particles and energy emissions. we are constantly surrounded by many kinds of radiations like radio waves or sunlight. A lot of those are not harmful to humans or to electronics devices. In big quantity some of them can warm water (Microwaves…) or create parasite in electronics.
Ionizing radiations are some kind of ray that can split molecules or atoms into ions. Those ions could emit ionizing radiations too. Ionizing rays can be dangerous for the human body depending on the amount received. They can create tumours or necrosis.
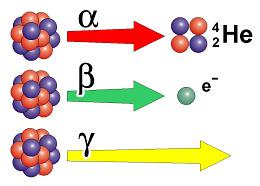
In nuclear environment some substances are emitting ionizing radiations, they are named radioisotopes (Uranium, tritium...), and they can emit four kinds of rays:
- Gammas radiations (Photons emission),
- Alphas radiations (Helium nucleus emission),
- Beta radiations (electron or positron emission),
- Neutron radiations (Neutron emission, these ones are not ionizing rays).
The dose of radiation is the quantity of energy transmitted by them to the organ or the tissue touched, three doses concepts exists expressed with different units:
- The absorbed dose represent the energy transmitted by the radiation without taking account of the kind of radiation expressed in Gray (Gy),
- The equivalent dose take account of the type of radiation (alpha, beta…) and is expressed in Sievert (Sv),
- The effective dose take account in addition of the kind, the organ that suffer of the beam they are expressed in Sievert too.
Now let’s return to our favourite robot. All the radiations described above can be found in high doses in the blind cell (that’s why humans can’t go here by the way) and unfortunately the RICA can be harmed by those rays too. More precisely its electronics parts are sensitives to the radiations.
One of the major problematic in the realization of electronics systems that has to work in nuclear environment is to make them resistant to ionizing radiations.
A lot of little electronics components are made of one kind of materials called semiconductors (the processor of your computer for example). This components can be destroyed by neutrons or gammas radiations.
In addition the risk exist that the robot could carry contaminated particles (that emit radiations), the RICA has to get out of the cell at the end of its intervention so it has to be contaminated as little as possible. So that’s why we need to protect the electronic part of the RICA so it will stay functional in the cell and make sure that the robot doesn’t bring contaminated particles (or as little as possible).
Now you know what the so called nuclear radiations are and why they can be bad for the RICA.
We hope that you liked this article.
In a future article we will explain how the robot will be protected against radiations and how answer to the need expressed upper.