We began working on the mobility system of the RICA robot : movements, crossing over obstacles…
So far we had two different classes : the first one’s objective is creating a complete plan of the robot architecture using Core, the second’s is modelizing the robot crossing over a 30 cm tall step on CATIA v5. I will elaborate on CATIA further below.
CATIA is one of the more complete CAD tools on the market and is used by important companies such as airplane companies to conceive their planes and realize calculations.

For the class we practiced creating simple forms such as wheels and tried to make them cross the step by applying different factors : speed, torque, lack of gravity… All of this is possible through the SimDesigner add-on. By creating a model, we can then study the effects of those different factors on the movement. Proceeding step by step we then modelized two wheels, then four.
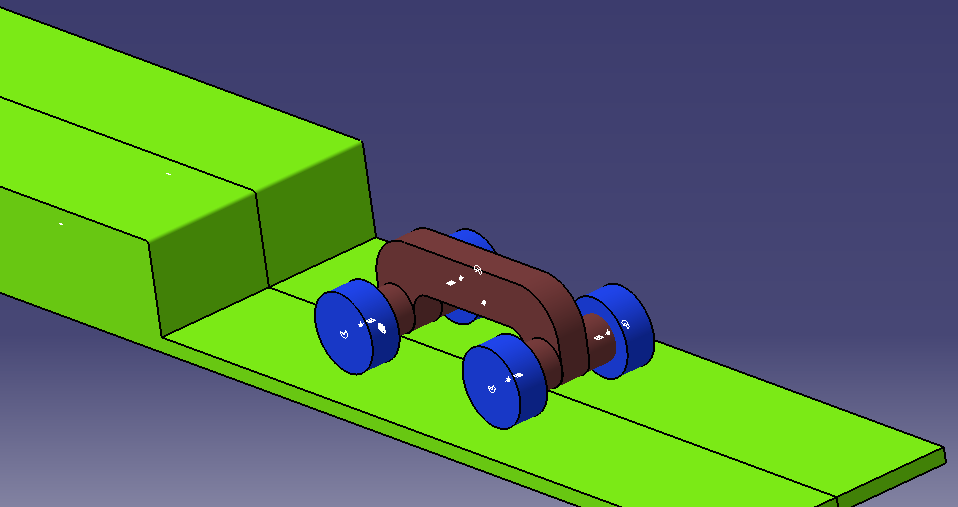
We are now one step closer to create the mobility system we are expected to do.
No comments:
Post a Comment