We are currently in the Rica IV prototype design phase. The goal is to build a functional robot which can climb stairs in normal conditions. For the prototype we don't take into account nuclear requirements. We only work on the crossing system.
We previously made a state of the art "climbing robot " to see what solutions already exist to answer our customer needs. We finally chose a 4 arm robot with tracks like the "chaos robot" architecture :

Regarding our budget, we decided to mechanically synchronise arms, two per two and tracks as well. It allows us to reduce the number of motors from 8 to 4.
Thanks to this cost-reduction, we can make a full scale robot meeting all displacements and crossing requirements.
To design the robot, we based our study on some tools like PBD (Physical Block Diagram) to define in detail each sub-assembly. Then we achieved the CAD and we chose all COTS (components off-the-shelf).
Here is the final architecture of our prototype (sheets components doesn't appears in detail) :
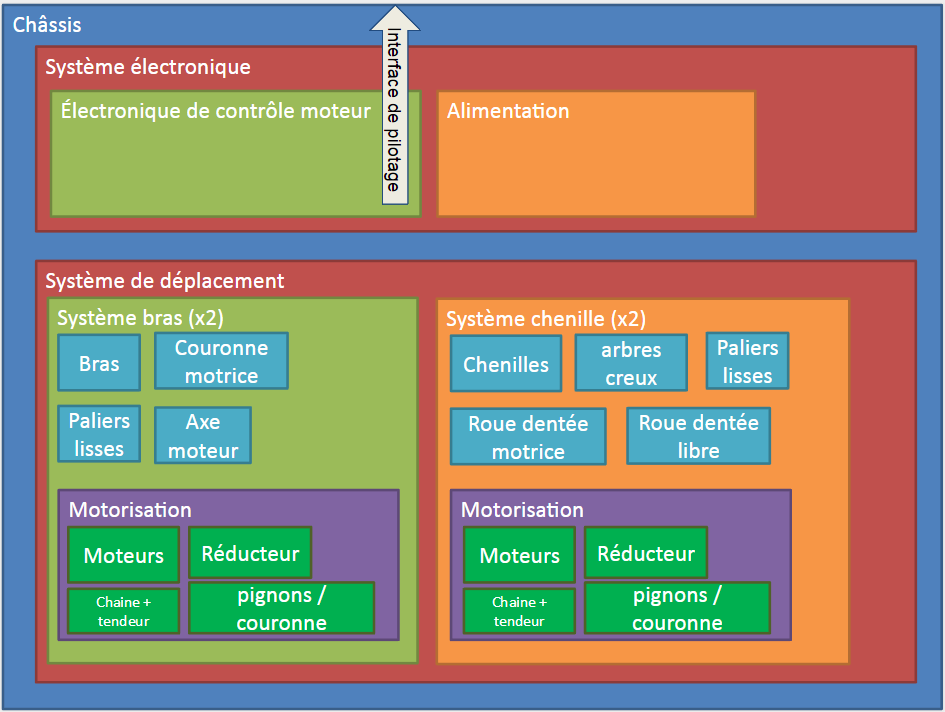
After several iterations within the team, we validated this architecture. Then we can start CAD and calculate all internal needs (like torque provided by motors, shaft's diameters...).
Ok
ReplyDelete