The purpose of this article is to explain the technical choices of the Cooperative robots project (the general article was posted on Wednesday, 23 November 2016 on this blog). According to the first article, the goal of this project was to make 5 sumo robots move together, in front of the main robot, the RICA.
To realize this project, we had at our disposal some specific material :
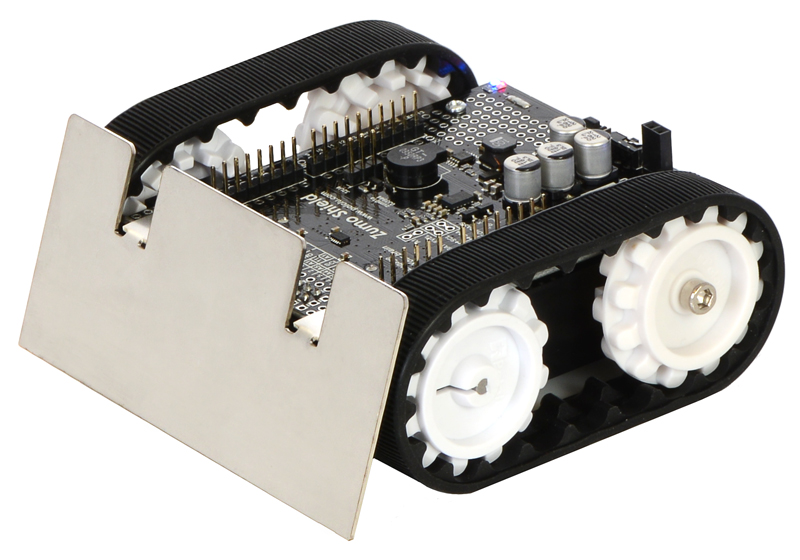
Firstly, the base of the robot was a Pololu Zumo robot. With this robot, all the parts needed for the locomotion (caterpillars, motors, power source and motor management) were ready to use.
To reach the goal of this project, one of the main challenges was to be able to detect the other robots. To do that, we could use three types of sensors, numeric infrared, analog infrared and analog ultrasonic.
For the detection of the other robots, most of us chose to use analog infrared sensors, because it is easy to use and provides distance informations. Some of us also use ultrasonic sensors to detect obstacles like walls
.

The other aspect of the detection was to make the robot easy to detect by the others, so it was very important to work on the shape of the robot. We choose to build an outer shell with flat sides to make a good surface for sensors. This external shell was made with a 3D printer, because it was an easy way for us to build lightweight parts.

Finally, to gather the information from sensors, execute the program and command motors, we used a microcontroller Arduino uno. In an upcoming article we’ll see the coding steps.

No comments:
Post a Comment