“We all do better when we work together. Our differences do matter, but our common humanity matters more.”
― Bill Clinton
We will put aside the humanity for now but, the rest of this quote pictures well the subject of this article. As we said in an older post, blind cells are very old rooms. Since their construction, a lot of scientific experimentations took place here over the years. The result of this is that the ground of the cells are filled with a lot of garbage and contaminated dust. Even for a tank robot it's hard to move in this kind of environment and it can also cause contamination.
So an important need is highlighted here and it is to clean the way before the dismantling robot RICA. Implementing this would avoid the potential surface contamination of the robot. It will improve the survival of electrical components and simplify the clean-up process of the robot.
One solution to answer this need is to add some pushing robots that will have to push the objects out of RICA’s path. Those little robots will have to collaborate with each others to help the RICA to move properly in the cell.
Therefore the realisation of those little robots was a subproject of the big project RICA IV that our class has to realise. During our first year of formation we had to create the first prototype of those cooperative robots. This first prototype was an academic project to make us apply our knowledge in programming and automation.
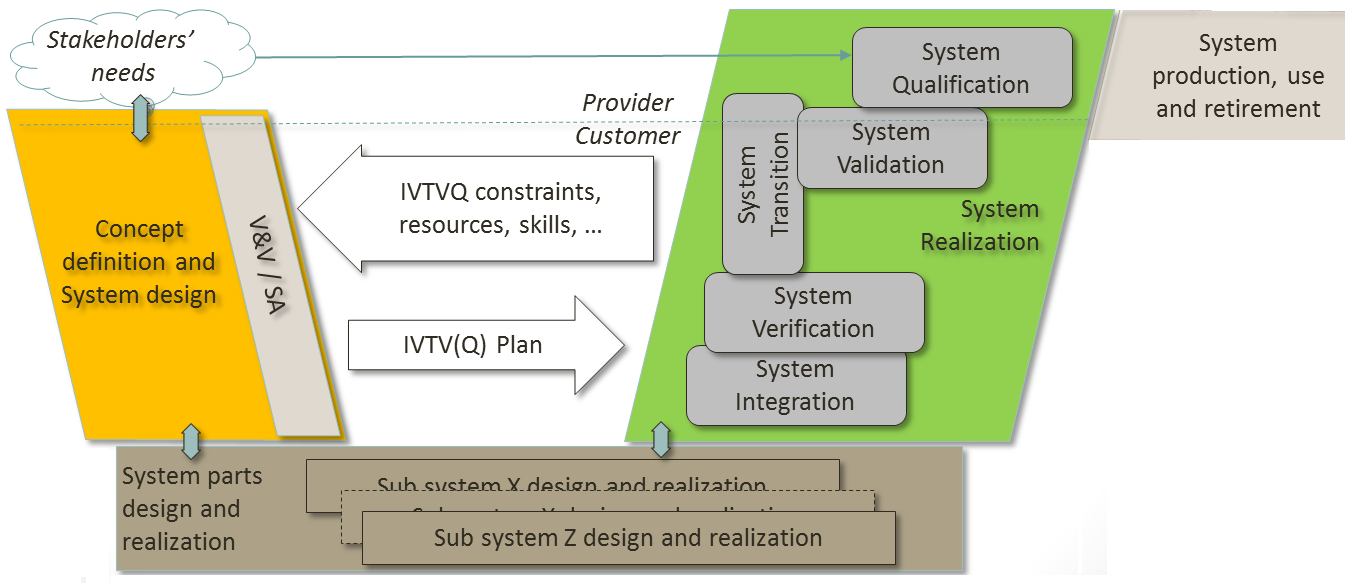
The specifications asks that five robots must be used, they're disposed in before the RICA in a row like we can see hereunder.

The central robot has to control its position considering the RICA's, it has to stay before the RICA at a settled distance without losing the dismantling robot. Each of the four side robots is guided by the one who move before it, to their left for the robots located on the right and at their right for the ones located on the left. Each robot has to be able to work in any position of the row, so they have to work in different modes that can be switched easily.
The class was divided in 5 groups, each group had to create one robot, they had to work together and with the RICA.
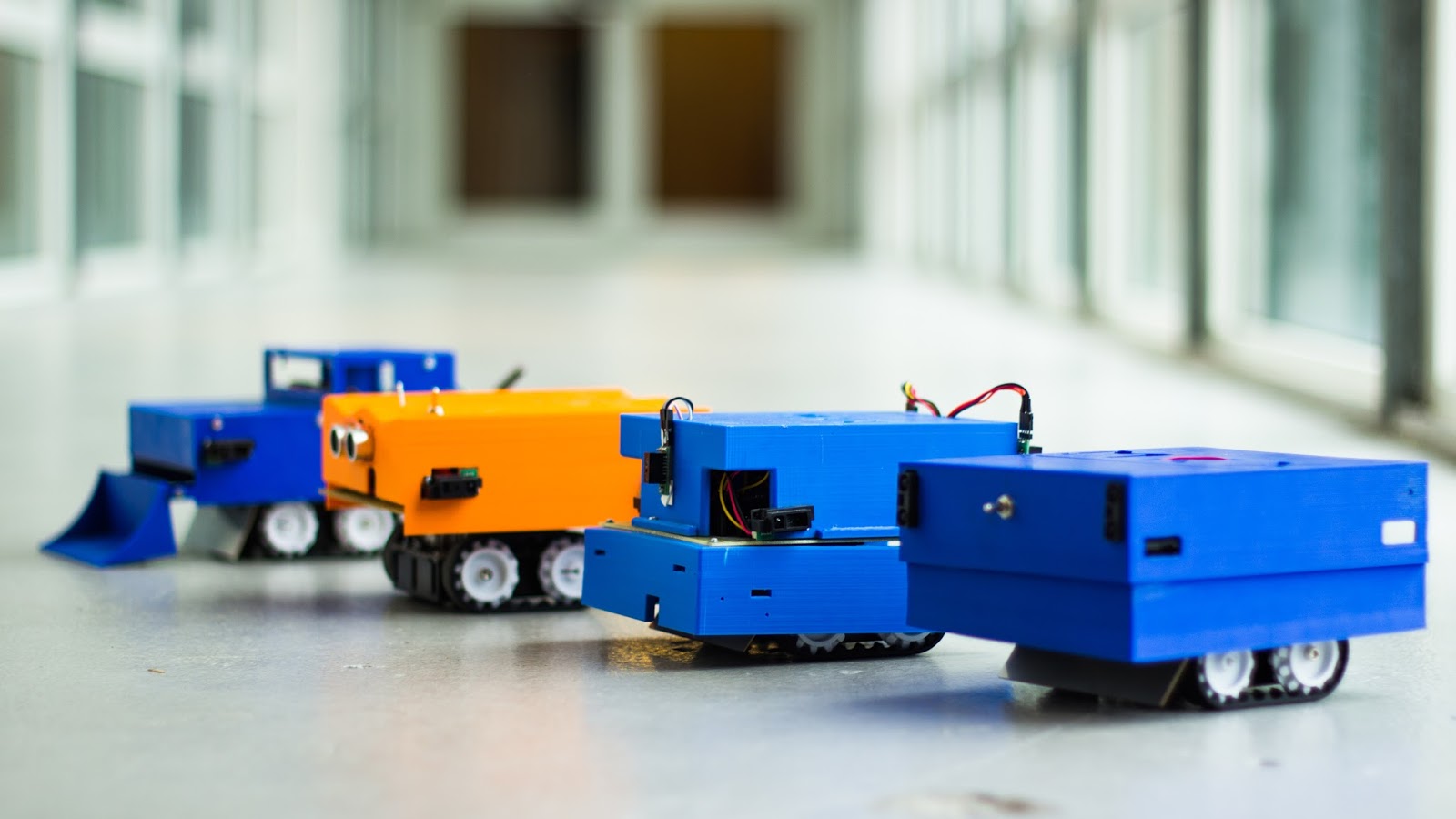
Unfortunately we did finished this project with four robots instead of five because a group had Human Ressource problems. In the end all the four robots were working and were physically different, it illustrates the distinct points of view of each group.
The next step to improve those robots would be to set up a wireless communication between them and an artificial intelligence to get real autonomous robots that can organize each other without human help.
[soon : link to video of robots working together]
[soon : link to robots’ realization]